最新动态
进迭时空亮相 Ubuntu Summit 2026,K3 成为全球首个原生适配 Ubuntu 26.04 LTS 的 RISC-V 计算平台

Upstream
- Linux Kernel Upstream
merged:
SPI: SpacemiT K1 SPI controller driver v10:Making sure you're not a bot! merged
SPI K1 DTS node (subset of v10):https://lore.kernel.org/all/177811891149.2316511.8217429551447102118.b4-ty@b4/ merged
thermal: K1 SoC thermal sensor DTS v5 3/3:Making sure you're not a bot! merged
k1-musepi-pro: add missing devices v3:https://lore.kernel.org/all/20260513071958.29574-1-a.heider@gmail.com/ merged
ASoC: spacemit: fix RX DMA params not set when TX is running:Making sure you're not a bot! merged
pinctrl: spacemit: fix NULL check:https://lore.kernel.org/all/20260519164007.122574-1-gaohan@iscas.ac.cn/ merged
phy: spacemit: Add USB2 PHY support for K3 SoC v4:Making sure you're not a bot! merged
phy: spacemit: Remove incorrect clk_disable():Making sure you're not a bot! merged
dmaengine: K3 PDMA support v6 driver 1-3/4:Making sure you're not a bot! merged
dts: spacemit: K3 PDMA controller node v6 4/4:Making sure you're not a bot! merged
spi: enable SpacemiT K3 SoC QSPI v2:Making sure you're not a bot! merged
dts: spacemit: k3: Add USB2.0 support v2:Making sure you're not a bot! merged
patch:
dts: k1-musepi-pro: add SD card support with UHS v11:Making sure you're not a bot! review
dts: spacemit: k1: Banana Pi BPI-CM6 IO board v1:Making sure you're not a bot! review
ASoC: shared BCLK rate constraint (cross-DAI) v2:Making sure you're not a bot! review
i2c: spacemit: improve clock handling (ILCR/IWCR) v7:Making sure you're not a bot! review
dts: spacemit: k3: Add pwm support v4:Making sure you're not a bot! review
ASoC: spacemit: add K3 SoC support v3:https://lore.kernel.org/all/20260522-k3-i2s-v3-0-08e3eb811d93@linux.spacemit.com/ review
PCI: spacemit: K3 PCIe host controller v2:Making sure you're not a bot! review
clk: spacemit: k3: PCIe clock fixes v2:Making sure you're not a bot! review
dt-bindings + dts: K3 CoM260-IFX board v2:Making sure you're not a bot! review
spacemit: fix USB2 clock and reset v1:https://lore.kernel.org/all/20260518-06-clk-reset-usb-fix-v1-0-14fc235e692b@kernel.org/ review
dts: spacemit: k3: Fix I/O power settings v1:Making sure you're not a bot! review
dts: spacemit: k3: Add Ziccrse extension v1:Making sure you're not a bot! review
板级 DTS / 设备支持:
dts: spacemit: set console baud rate on bpif3:Making sure you're not a bot! merged
dts: spacemit: enable eMMC for OrangePi RV2:Making sure you're not a bot! merged
dts: spacemit: correct 32k clock frequency:https://lore.kernel.org/all/177847498895.951618.10632308286447634075.b4-ty@b4/ merged
SD card UHS modes OrangePi RV2 v10, DTS 1-3/4:Making sure you're not a bot! merged
dts: spacemit: enable QSPI for OrangePi RV2:Making sure you're not a bot! merged
dts: improve Milk-V Jupiter v2, 5 patches:Making sure you're not a bot! merged
dts: enable USB3 on OrangePi R2S v2:Making sure you're not a bot! merged
dts: set console baud rate on OrangePi RV2 v1:Making sure you're not a bot! review
dts: enable PMIC on OrangePi R2S v1:Making sure you're not a bot! review
Bug fix:
- spi: spacemit: add u64 cast to avoid 32-bit overflow:Making sure you're not a bot! merged
- Triton Upstream
主要更新:
SpacemiT Triton算子库合入FlagOS:
SpacemiT Tritron编译器月度更新:
Release v0.5.4 · spacemit-com/spine-triton · GitHub
修复 lowering 相关问题,包括 ptr dialect 迁移、bitcast 类型桥接、内存空间传播以及 scan 修复
后端新增 0xF000 arch_id 到 spacemit-a100 的映射
新增 spine-triton 原生 RISC-V 构建脚本
移除 f16 matmul 特殊路径
新增 lib 目录,更新 variables.env
更新 spine-mlir 至 0.5.4,并完成相关依赖更新
修复 CI 中 speir extract root 相关问题
- LLVM Upstream
merged:
- [compiler-rt] Inline __NR_riscv_flush_icache instead of including linux/unistd.h:[compiler-rt] Inline __NR_riscv_flush_icache instead of including linux/unistd.h by zqb-all · Pull Request #193645 · llvm/llvm-project · GitHub merged
- U-Boot Upstream
patch:
K1 clock/reset/upstream DTS:https://lore.kernel.org/u-boot/20260526-b4-k1-clk-reset-upstream-dts-v2-0-af815e362b0c@riscstar.com/ v2
SPL bring-up:https://lore.kernel.org/u-boot/20260519-b4-k1-spl-bring-up-v4-0-3915a2a904c1@riscstar.com/T/#t v4
pinctrl/GPIO/SPI NOR:Making sure you're not a bot! v2
- 其他
box64:
[RCFILE] Added a setting to Feishu:[RCFILE] Added a setting to Feishu by lz-bro · Pull Request #3833 · ptitSeb/box64 · GitHub merged
[WRAPPER] Add gnutls_free wrapped function for libgnutls:[WRAPPER] Add gnutls_free wrapped function for libgnutls by zengdage · Pull Request #3824 · ptitSeb/box64 · GitHub merged
[CORE] Fix unexpected modification of GetNativeName’s return value:[CORE] Fix unexpected modification of GetNativeName's return value by zengdage · Pull Request #3845 · ptitSeb/box64 · GitHub merged
[DYNAREC] Save temporary registers on the stack before calling PrintT…:[DYNAREC] Save temporary registers on the stack before calling PrintT… by zengdage · Pull Request #3876 · ptitSeb/box64 · GitHub merged
[DYNAREC] Modify natflags register save logic to now save all scratch registers:[DYNAREC] Modify natflags register save logic to now save all scratch registers by zengdage · Pull Request #3880 · ptitSeb/box64 · GitHub merged
riscv-gnu-toolchain:
- musl: Add llvm OpenMP support and disable compiler-rt sanitizers:musl: Add llvm OpenMP support and disable compiler-rt sanitizers by zqb-all · Pull Request #1843 · riscv-collab/riscv-gnu-toolchain · GitHub merged
binutils:
- [PATCH v6] RISC-V: Add SpacemiT vendor extensions xsmtvdot and xsmtvdotii:https://sourceware.org/pipermail/binutils/2026-May/149417.html review
生态进展
国际峰会:
进迭时空携手 RVI 亮相 OSS/ELC NA 2026
进迭时空参加 Open Source Summit + Embedded Linux Conference North America 2026 ,并在同期 RISC-V Insights Mini Summit 进行了 K3 硬件能力与开源生态主题分享。

项目案例:
进迭时空 K1 落地荷坳水厂,实现 RISC-V + 鸿蒙 全栈自主智能化升级
进迭时空联合吉斯凯达、中国科学院软件研究所,基于自研 RISC-V AI CPU K1 完成深圳荷坳水厂"鸿蒙化 2.0 升级"项目。方案以基于 K1 的鸿蒙智控器替代传统"PLC+网关+边缘设备"组合架构,实现从底层芯片到上层工控软件的完整鸿蒙化体系。

X200:
进迭时空第三代高性能 RISC-V 处理器核 X200 正式完成研发 。相比X100,最新一代X200 在单核性能、向量计算、访存系统、多核互联、虚拟化、安全与RAS 等方面持续提升,单核性能达到 16分/GHz@SPEC2006 Int。X200 针对Agent 计算机(Agent Computer)、迷你 AI 超算(Personal AI Supercomputer)、具身机器人、云计算等场景进行了专项优化。

K3 shelf:
K3 真机编译效率提升 10 倍
对于依赖 QEMU 仿真进行 RISC-V 开发的工程师而言,进迭时空 K3 提供了一个更高效的选择。实测数据显示,K3 真机编译相比 QEMU system-mode 提速 10 倍,以 Linux 内核 6.18 为例,编译时间从 3.8 小时缩短至 22 分钟。

高校比赛:
2026全国大学生计算机系统能力大赛操作系统设计赛报名结束。
2026华秋杯AI开源硬件设计创新大赛开始报名
报名链接:
https://mp.weixin.qq.com/s/fYYGgIvYXQ9OW28QpGdHpA
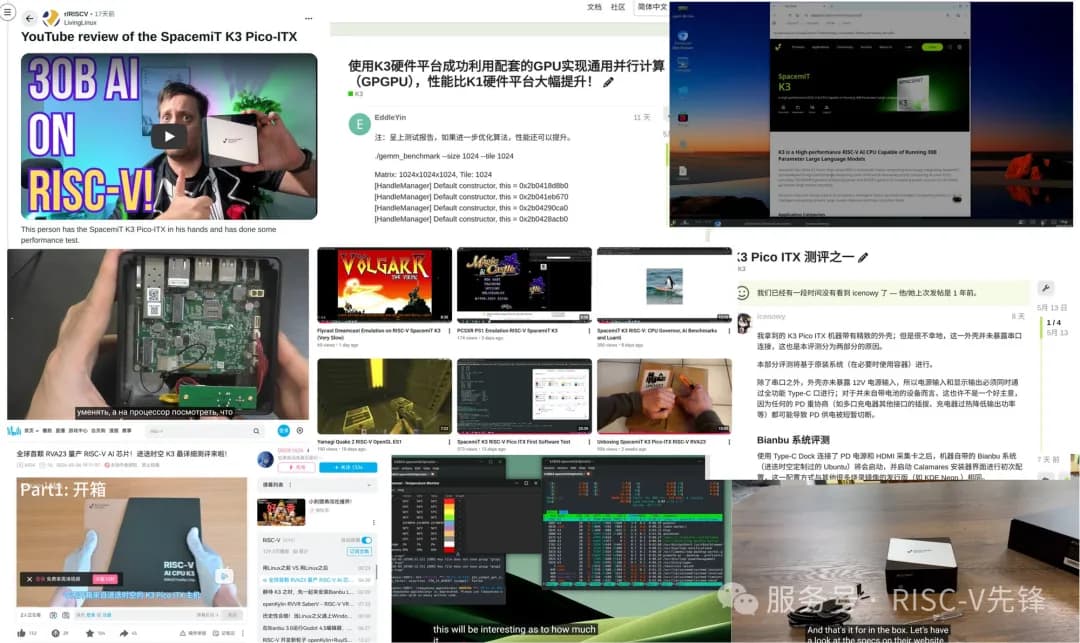
k3 开发者反馈:
K3 SBC首发覆盖Youtube、Reddit、X、B站、CNX/phoronix/AndroidPimp等技术论坛、个人独立博客等海内外平台,开发者反响火热
版本发布
Bianbu
- Bianbu LXQt
发布Bianbu4.0 v1.0.2
发布Bianbu4.0 v2.3.4
本月移植了Bianbu4.0上的内容到2.0上
主要更新内容:
-
设置——外观设置
-
桌面切换动画
-
支持小分辨率屏幕
-
移植Bianbu4.0上的内容到2.0上
Bianbu 4.0.2更新日志地址:
https://www.spacemit.com/community/document/info?lang=zh&nodepath=software/SDK/bianbu/release_notes/bianbu_4.0.md
Bianbu 2.3.4更新日志地址:
https://www.spacemit.com/community/document/info?lang=zh&nodepath=software/SDK/bianbu/release_notes/bianbu_2.3.md
- Bianbu OS
发布bianbu os v4.0.1
主要更新内容:
-
软件源:软件源升级适配为Ubuntu 26.04正式源
-
Boot:修复reboot fastboot无法烧录的问题
-
显示:wlroot修复休眠唤醒后桌面背景概率性丢失问题
下载地址:
https://spacemit.com/community/resources-download/Images%20Collects/K3/Bianbu
更新日志:
https://spacemit.com/community/document/info?lang=zh&nodepath=software/SDK/bianbu/release_notes/bianbu_4.0.md
AI推理引擎
- Llama.cpp
发布 v0.1.1
主要更新内容:
- bug修复:修复了 SMT 多模态模型的 llama-server 槽擦除行为。
下载地址:
https://github.com/spacemit-com/llama.cpp/releases/tag/spacemit-llama.cpp.riscv64.0.1.1
- onnxruntime
发布 2.0.3
主要更新内容:
-
引入了融合yolo-decode运算符。
-
修复了段错误banet
-
修复了 FP16 正确性问题yolov8n
-
修复了动态分辨率段错误3dspeaker
下载地址:
https://github.com/spacemit-com/onnxruntime/releases/tag/2.0.3
- Spine-FlagGems
发布 v5.0.1
主要更新内容:
- 同步至FlagOS上游,已合入主线
下载地址:
hhttps://github.com/spacemit-com/spine-FlagGems/tree/add-spacemit-rt-ops
- spine-triton
发布 v0.5.4
主要更新内容:
- 针对融合大算子的如flashattention、FFN融合激活等写法进行了codegen支持,修复了K3指令调度问题
安装方式:
pip install triton==3.6.0+spacemit.a4 --index-url https://git.spacemit.com/api/v4/projects/33/packages/pypi/simple
ROS2
本月完善了桌面机器人、轮式机器人、机械臂、人形机器人应用;增强了端侧语言交互,声源定位,视觉推理,强化学习策略执行和导航控制的能力;
版本发布:
开源持续更新(GitHub/Gitee 同步发布,最新提交:2026-05-30)
主要更新内容:
-
丰富模型库能力:视觉统一推理接口并简化配置;LLM优化Open AI tool calling兼容;ASR规范离线音频处理;TTS默认使用量化模型并优化英文音素化;支持声纹注册;
-
新增DOA声源定位组件:支持双声道和多声道 GCC-PHAT 定位、C++/Python 接口、实时麦克风示例,并接入 Omni Agent应用
-
完善Ai 网关:支持 ASR/TTS/VAD/Vision/LLM/Embed/Rerank 统一 HTTP/WS API、模型按需加载、音频上传规范化、模型 MD5/URL 元数据和前端控制台体验。
-
完善多媒体与外设基础能力:MPP 同步新版视频/VI/RTSP 能力;Audio 增强播放缓冲和流设备处理;IMU 支持 ICM42670P INT1 中断;电机支持参数设置、EtherCAT 周期任务优先级和 RoHS 空闲处理;IO 支持时间戳和中断事件。
Github更新日志:
https://github.com/spacemit-robotics
Gitee更新日志:
https://gitee.com/spacemit-robotics
Buildroot
- K1
更新至 V2.2.9 (v2.2 为K1 buildroot长期支持版本)
具体更新链接:
https://www.spacemit.com/community/document/info?nodepath=software/SDK/buildroot/k1_buildroot/release_notes/bl-v2.2.y.md&lang=zh
- K3
发布k3 buildroot sdk v1.0.2
主要更新内容:
-
支持 KVM/VTVM 虚拟化及 eBPF 动态追踪
-
支持 RISC-V IMSIC Multi MSI 中断
-
支持 AMD GPU(amdgpu/radeon),适配 PCIe Gen3
-
支持 SPI 控制器驱动(含 suspend/resume)
-
支持 DDR 12GB 及 SPL 阶段 CPU 调频
-
支持 Fastboot 刷写 EC 固件
-
支持RT-Linux 专用 defconfig
-
支持 R8169 网卡驱动
-
修复 mailbox 驱动死锁问题
-
修复 USB TypeC fusb301 状态机逻辑错误
-
修复 Bluetooth btrtl 空指针崩溃问题
-
修复 AI DMA 并发链表访问及内存泄漏
-
修复 display 驱动空指针问题
更新链接:
https://spacemit.com/community/document/info?lang=zh&nodepath=software/SDK/buildroot/k3_buildroot/release_notes/bl-v1.0.y.md
镜像下载链接:
https://spacemit.com/community/resources-download/Images%20Collects/K3/Buildroot
OpenHarmony
本月完成 K3+OpenHarmony6.1 的点亮,且代码已开放
- K3
发布 OH6.0 V0.1
主要更新内容:
-
支持在Pico-ITX上点亮,HDMI,鼠标,键盘,以太网可用
-
支持在com260上点亮,DP,鼠标,键盘,以太网可用
镜像下载链接:
https://www.spacemit.com/community/resources-download/Images%20Collects/K3/OpenHarmony
具体更新链接:
https://www.spacemit.com/community/document/info?lang=zh&nodepath=software/SDK/openharmony/k3_oh6.1/1_K3_OH6.1_intro.md